Telemetry framework in LLVM#
Objective#
Provides a common framework in LLVM for collecting various usage and performance
metrics.
It is located at llvm/Telemetry/Telemetry.h.
Characteristics#
Configurable and extensible by:
Tools: any tool that wants to use Telemetry can extend and customize it.
Vendors: Toolchain vendors can also provide custom implementation of the library, which could either override or extend the given tool’s upstream implementation, to best fit their organization’s usage and privacy models.
End users of such tool can also configure Telemetry (as allowed by their vendor).
Important notes#
There is no concrete implementation of a Telemetry library in upstream LLVM. We only provide the abstract API here. Any tool that wants telemetry will implement one.
The rationale for this is that all the tools in LLVM are very different in what they care about (what/where/when to instrument data). Hence, it might not be practical to have a single implementation. However, in the future, if we see enough common pattern, we can extract them into a shared place. This is TBD - contributions are welcome.
No implementation of Telemetry in upstream LLVM shall store any of the collected data due to privacy and security reasons:
Different organizations have different privacy models:
Which data is sensitive, which is not?
Whether it is acceptable for instrumented data to be stored anywhere? (to a local file, what not?)
Data ownership and data collection consents are hard to accommodate from LLVM developers’ point of view:
E.g., data collected by Telemetry is not necessarily owned by the user of an LLVM tool with Telemetry enabled, hence the user’s consent to data collection is not meaningful. On the other hand, LLVM developers have no reasonable ways to request consent from the “real” owners.
High-level design#
Key components#
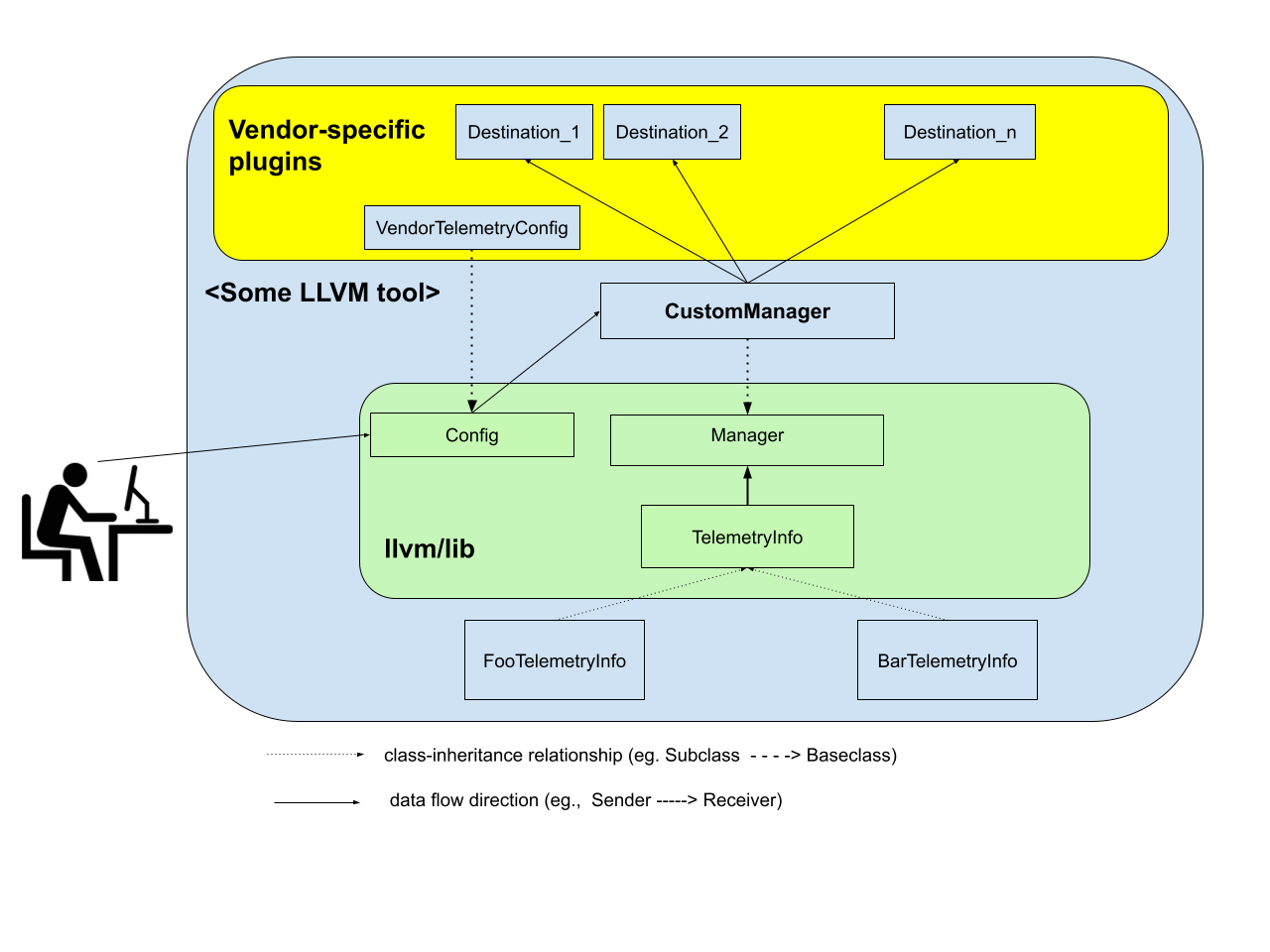
The framework consists of four important classes:
llvm::telemetry::Manager: The class responsible for collecting and transmitting telemetry data. This is the main point of interaction between the framework and any tool that wants to enable telemetry.llvm::telemetry::TelemetryInfo: Data courierllvm::telemetry::Destination: Data sink to which the Telemetry framework sends data. Its implementation is transparent to the framework. It is up to the vendor to decide which pieces of data to forward and where to forward them to for their final storage.llvm::telemetry::Config: Configurations for theManager.
How to implement and interact with the API#
To use Telemetry in your tool, you need to provide a concrete implementation of the Manager class and Destination.
Define a custom
Serializer,Manager,Destinationand optionally a subclass ofTelemetryInfo
class JsonSerializer : public Serializer {
public:
json::Object *getOutputObject() { return Out.get(); }
Error init() override {
if (Started)
return createStringError("Serializer already in use");
started = true;
Out = std::make_unique<json::Object>();
return Error::success();
}
// Serialize the given value.
void write(StringRef KeyName, bool Value) override {
writeHelper(KeyName, Value);
}
void write(StringRef KeyName, int Value) override {
writeHelper(KeyName, Value);
}
void write(StringRef KeyName, long Value) override {
writeHelper(KeyName, Value);
}
void write(StringRef KeyName, long long Value ) override {
writeHelper(KeyName, Value);
}
void write(StringRef KeyName, unsigned int Value) override {
writeHelper(KeyName, Value);
}
void write(StringRef KeyName, unsigned long Value) override {
writeHelper(KeyName, Value);
}
void write(StringRef KeyName, unsigned long long Value) override {
writeHelper(KeyName, Value);
}
void write(StringRef KeyName, StringRef Value) override {
writeHelper(KeyName, Value);
}
void beginObject(StringRef KeyName) override {
Children.push_back(json::Object());
ChildrenNames.push_back(KeyName.str());
}
void endObject() override {
assert(!Children.empty() && !ChildrenNames.empty());
json::Value Val = json::Value(std::move(Children.back()));
std::string Name = ChildrenNames.back();
Children.pop_back();
ChildrenNames.pop_back();
writeHelper(Name, std::move(Val));
}
Error finalize() override {
if (!Started)
return createStringError("Serializer not currently in use");
Started = false;
return Error::success();
}
private:
template <typename T> void writeHelper(StringRef Name, T Value) {
assert(Started && "serializer not started");
if (Children.empty())
Out->try_emplace(Name, Value);
else
Children.back().try_emplace(Name, Value);
}
bool Started = false;
std::unique_ptr<json::Object> Out;
std::vector<json::Object> Children;
std::vector<std::string> ChildrenNames;
};
class MyManager : public telemetry::Manager {
public:
static std::unique_ptr<MyManager> createInstance(telemetry::Config *Config) {
// If Telemetry is not enabled, then just return null;
if (!Config->EnableTelemetry)
return nullptr;
return std::make_unique<MyManager>();
}
MyManager() = default;
Error preDispatch(TelemetryInfo *Entry) override {
Entry->SessionId = SessionId;
return Error::success();
}
// You can also define additional instrumentation points.
void logStartup(TelemetryInfo *Entry) {
// Add some additional data to entry.
Entry->Msg = "Some message";
dispatch(Entry);
}
void logAdditionalPoint(TelemetryInfo *Entry) {
// .... code here
}
private:
const std::string SessionId;
};
class MyDestination : public telemetry::Destination {
public:
Error receiveEntry(const TelemetryInfo *Entry) override {
if (Error Err = Serializer.init())
return Err;
Entry->serialize(Serializer);
if (Error Err = Serializer.finalize())
return Err;
json::Object Copied = *Serializer.getOutputObject();
// Send the `Copied` object to wherever.
return Error::success();
}
private:
JsonSerializer Serializer;
};
// This defines a custom TelemetryInfo that has an additional Msg field.
struct MyTelemetryInfo : public telemetry::TelemetryInfo {
std::string Msg;
Error serialize(Serializer &Serializer) const override {
TelemetryInfo::serialize(serializer);
Serializer.writeString("MyMsg", Msg);
}
// Note: implement getKind() and classof() to support dyn_cast operations.
};
Use the library in your tool.
Logging the tool init-process:
// In tool's initialization code.
auto StartTime = std::chrono::time_point<std::chrono::steady_clock>::now();
telemetry::Config MyConfig = makeConfig(); // Build up the appropriate Config struct here.
auto Manager = MyManager::createInstance(&MyConfig);
// Any other tool's init code can go here.
// ...
// Finally, take a snapshot of the time now so we know how long it took the
// init process to finish.
auto EndTime = std::chrono::time_point<std::chrono::steady_clock>::now();
MyTelemetryInfo Entry;
Entry.Start = StartTime;
Entry.End = EndTime;
Manager->logStartup(&Entry);
Similar code can be used for logging the tool’s exit.